自考生网为考生们整理提供了“2005年10月自考02306自动控制理论(二)历年真题及答案”,更多02306自动控制理论(二)真题内容可点击查看02306自动控制理论(二)真题及答案汇总。
注:不同省份、不同专业的自考历年真题及答案,只要课程代码和课程名称相同,都可参考使用。
1、研究自动控制系统时常用的典型输入信号是( )
A.脉冲函数
B.斜坡函数
C.抛物线函数
D.阶跃函数
2、实轴上根轨迹右端的开环实数零点、极点的个数之和为( )
A.零
B.大于零
C.奇数
D.偶数
3、PID 控制器的传递函数形式是( )
A.5+3s
B.5+3
C.5+3s+3
D.5+
4、拉氏变换将时间函数变换成( )
A.正弦函数
B.单位阶跃函数
C.单位脉冲函数
D.复变函数
5、线性定常系统的传递函数,是在零初始条件下( )
A.系统输出信号与输入信号之比
B.系统输入信号与输出信号之比
C.系统输入信号的拉氏变换与输出信号的拉氏变换之比
D.系统输出信号的拉氏变换与输入信号的拉氏变换之比
6、PID 控制器中,积分控制的作用是( )
A.克服对象的延迟和惯性
B.能使控制过程为无差控制
C.减少控制过程的动态偏差
D.使过程较快达到稳定
7、当二阶系统的根分布在右半根平面时,系统的阻尼比ξ为( )
A.ξ<0
B.ξ=0
C.0<ξ1
D.ξ>1
8、若某系统的传递函数为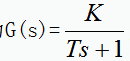 ,则其频率特性的实部R(ω)是( )
,则其频率特性的实部R(ω)是( )
A.
B.
C.
D.
9、已知系统前向通道和反馈通道的传递函数分别为G(s)= ,H(s)=1+Khs,当闭环临界稳定时,Kh 值应为( )
【原题截图】
A.-1
B.-0.1
C.0.1
D.1
10、闭环系统特征方程为G(s)H(s)=-1,其中G(s)H(s)的矢量表示为( )
(各备选项中l=0,1,2……)
A.1/(2l+1)π
B.1/±(2l+1)π
C.1/(±2lπ)
D.1/(±1π)
11、某串联校正装置的传递函数为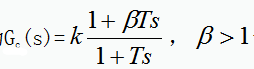 ,该校正装置为( )
,该校正装置为( )
A.滞后校正装置
B.超前校正装置
C.滞后—超前校正装置
D.超前—滞后校正装置
12、若系统的状态方程为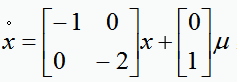 ,则该系统的特征根为( )
,则该系统的特征根为( )
A.
B.
C.
D.
13、若系统, 具有可观测性,则常数a 取值为( )
具有可观测性,则常数a 取值为( )
A.
B.
C.
D.
14、若系统, 具有可观测性,则常数a 取值为( )
具有可观测性,则常数a 取值为( )
A.a≠1
B.a=1
C.a≠2
D.a=2
15、设开环系统频率特性 ,则其对数幅频特性的渐近线中频段斜率为( )
,则其对数幅频特性的渐近线中频段斜率为( )
A.-60dB/dec
B.-40dB/dec
C.-20dB/dec
D.0dB/dec
全专业电子资料、题库、学位、网课
最高直省2344元
上千+科次精品网课
买网课即送全真模考题库
五千+科次教材资料
电子资料满三件9折
五千+科次在线题库
全真呈现历年考试试题



关于我们 Copyright © 2010 - 2023 湖南求实创新教育科技有限公司 All Right Reserved.
温馨提示:本网站所提供的考试信息仅供考生参考,考试政策请以权威部门公布的正式信息为准。