
自考生网为考生们整理提供了“2005年4月自考02245机电一体化系统设计历年真题及答案”,更多02245机电一体化系统设计真题内容可点击查看02245机电一体化系统设计真题及答案汇总。
注:不同省份、不同专业的自考历年真题及答案,只要课程代码和课程名称相同,都可参考使用。
1、主要用于系统中各级间的信息传递的模块称 【 】
A.通信模块
B.接口模块
C.软件模块
D.测量模块
2、在常用的滚珠丝杠螺母副的间隙消除方法中,调整精度最高的一种是 【 】
A.双螺母齿差式
B.双螺母螺纹式
C.双螺母垫片式
D.单螺母变位导程式
3、为了防止机械振动和颤振,机械系统具有适当的阻尼是必要的。根据经验,适当的阻尼比应满足不等式。 【 】
A.
B.
C.
D.
4、用光电编码器进行角度测量时,为辨别转向,采用两个光电转换器,并使它们的相对位置保证两者所产生的电信号在相位上相差 【 】
A.450
B.900
C.1200
D.1800
5、为使圆光栅产生测量所需的莫尔条纹,将两块栅距相同的圆光栅叠合时相互间应【 】
A.保持一个很小的偏心量
B.使偏心量按所需规律变化
C.保持圆心重合
D.保持光栅刻线重合
6、全闭环数控机床上位置传感元件应装在 【 】
A.电机轴端
B.减速齿轮轴端
C.滚珠丝杠轴端
D.工作台运动部件上
7、两台交流感应电动机A和B。A为2极,B为4极,两台电动机工作在转差率相同的条件下,则其转差△nA和△nB的关系为 【 】
A.△nA>△nB
B.△nA=△nB
C.△nA<△nB
D.不确定
8、题8图称为 【 】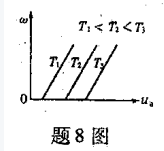
A.直流伺服电动机调节特性
B.直流伺服电动机机械特性
C.直流伺服电动机动态特性
D.直流伺服电动机调速范围
9、由计算机运动控制软件控制的步进电动机控制系统,其输出轴的位置取决于 【 】
A.参考脉冲频率
B.参考脉冲数
C.转向信号高电平
D.转向信号低电平
10、提高系统伺服刚度的方法是 【 】
A.增大电枢回路电阻Ra
B.增大系统增益Ks
C.减小电机反电势系数Ke
D.减小电机的电磁转矩系数Kt
11、在数控系统中,硬伺服系统的系统增益Ks为 【 】
A.
B.
C.
D.
12、点位运动是在容许加速度条件下,尽可能以最大速度由源坐标运动到目的坐标位置,对于两点之间的轨迹要求是 【 】
A.高精度的
B.低精度的
C.适当精度的
D.没有精度的
13、题13图示利用继电器触点实现的逻辑函数为 【 】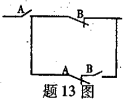
A.
B.
C.
D.
14、梯形图中的计数器,采用的助记符指令为
A.OR STR
B.AND STR
C.TMR
D.UDC
15、处理机、电关系原则中的增强机械系统
全专业电子资料、题库、学位、网课
最高直省2344元
上千+科次精品网课
买网课即送全真模考题库
五千+科次教材资料
电子资料满三件9折
五千+科次在线题库
全真呈现历年考试试题
自考生题库
专业智能,巩固提分
历年真题
真题全景再现
进入做题
模拟考场
海量题随机做
进入做题
考前点题
部分科目押题
进入做题
章节练习
章节专项突破
进入做题
错题收纳
试题收藏复习
进入做题
易错题
高频易错习题
进入做题

微信公众号
网课试听
教材大全
做题闯关

扫描二维码 关注公众号
微信小程序
资料大全
免费题库
无需下载

扫描小程序码 领免费题库

Copyright © 2010 - 2023 湖南求实创新教育科技有限公司 All Right Reserved.
温馨提示:本网站所提供的考试信息仅供考生参考,考试政策请以权威部门公布的正式信息为准。












 微信小程序
微信小程序




{kind=link}